Vengono ideate e sviluppate soluzioni avanzate per l’automazione industriale. Le ricerche includono la progettazione di sistemi meccatronici intelligenti, lo studio di robot collaborativi, la sensoristica avanzata e algoritmi per il controllo, la visione artificiale e l’ottimizzazione dei processi produttivi. Il trasferimento tecnologico si concretizza tramite collaborazioni con aziende, progetti finanziati, sviluppo di prototipi e brevetti, nonché attività di consulenza tecnica e formazione. L’obiettivo è portare tecnologie innovative dal laboratorio alla fabbrica, sostenendo l’innovazione industriale e la competitività del territorio.
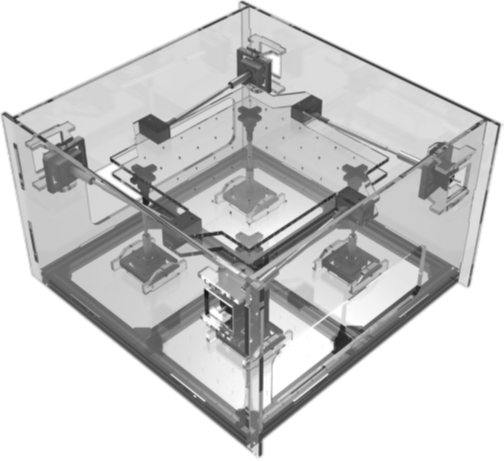
Modello in scala di una macchina a cinematica parallela per la simulazione di eventi sismici (progetto STRIC/STRIC+)
Prof. Massimo Callegari
Tel. +39 071 220 4444
E-mail: m.callegari@staff.univpm.it